

Inspired by the movements of spiders, the innovative robot Charlotte is designed to fabricate structures on the Moon using local materials. Operating as a mobile 3D printer, this machine transforms lunar dust and sand into durable bricks, paving the way for future habitats beyond Earth.
Charlotte represents a novel approach to extraterrestrial construction. Unlike conventional 3D printers, it features six legs for mobility, enabling it to traverse rugged lunar terrain while building structures layer by layer by melting and reforming the Moon’s surface soil. Its developers envision autonomous robots like Charlotte assembling lunar bases without the need to transport hefty materials from Earth.
Turning Moon Dirt Into Construction Materials
The key innovation behind Charlotte lies in its capacity to heat and mold lunar soil into stable building elements. The Moon’s surface is blanketed with sharp, fine dust composed of fragmented rocks. Charlotte applies intense heat to fuse this dust into solid, brick-like pieces, which can then be stacked to create various structures.

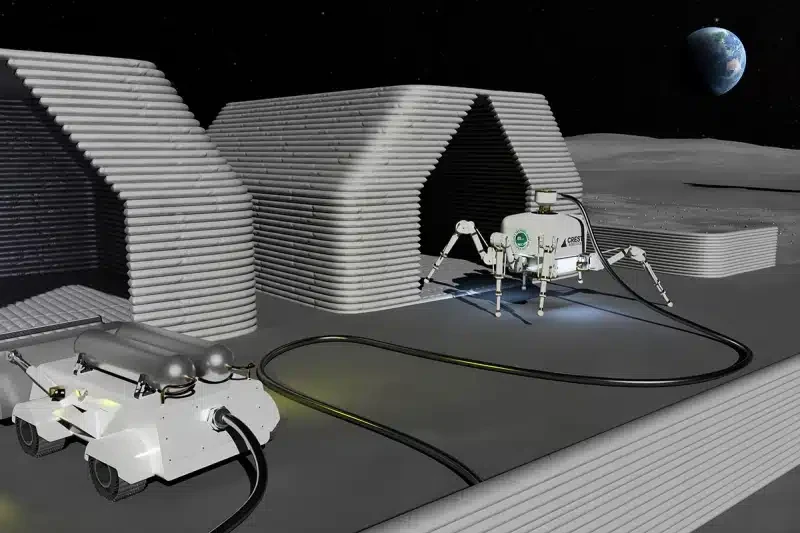
This robot's printing module is attached to a legged platform, combining stability with broad maneuverability. As described by Earthbuilt Technology, this legged design distinguishes Charlotte from fixed 3D printers, allowing it to relocate, optimize positioning, and cover expansive areas when constructing lunar habitats.
“It’s a spider-like … animal, bio-inspired creation that is meant to help resolve some of our highest housing crises,” explained Founding director of Crest Robotics, Clyde Webster. “It’s essentially a giant, massive 3D printer that’s going to be able to print homes out of sustainable building materials.”
This technology streamlines construction by removing the need for auxiliary vehicles or machinery to move building parts.
Legged Locomotion: Why Six Legs Matter
Charlotte’s six-legged configuration grants superior adaptability to rocky and uneven lunar landscapes. Wheels often get stuck in soft dust or fail on sudden drops, whereas legs can navigate varied surfaces with greater ease.
Considering the Moon’s reduced gravity and lack of atmosphere, maintaining balance is vital. The robot’s articulated legs adjust with every step to prevent tipping or sinking into the dusty ground.

Its autonomous mobility means Charlotte can reach build sites on its own without needing assembly or transport equipment. The fully integrated design makes it especially suited for missions where human presence is minimal or delayed.
Enhancing Space Missions Through Autonomous Building
Charlotte’s development aligns with renewed efforts for sustainable lunar exploration. With NASA’s Artemis program focusing on a sustained human presence on the Moon, robotic infrastructure support is essential. According to Australian Broadcasting Coorporation, robots like Charlotte could prepare habitats before humans land, enhancing safety and reducing mission costs.
“In the coming years, after we get the first man missions back, we’re open to start trialling technologies that can do this construction of infrastructure [on the moon],” added Dr. Clyde Webster. “By supporting this technology and doing it in an extreme environment like in space, we actually make solving problems here on Earth a lot easier.”
By using local materials for shelters, landing platforms, and storage units, this approach minimizes the need for frequent supplies from Earth. It also provides flexibility to design modular bases tailored to evolving mission requirements. Success with robotic construction on the Moon will inform future projects on Mars and beyond.
- Categories:
- Space











0 comments
Sign in to Comment