

A recent study published in Science Robotics highlights a daring field experiment that mimics robotic exploration of underground lava tubes—geological formations believed to be present on both Mars and the Moon. Created by ancient volcanic processes, these subterranean tunnels are prime targets for future habitats and missions aimed at detecting signs of life. Scientists tested the potential of autonomous robots by deploying a robotic team inside a natural lava cave on Lanzarote, an island in the Canary Islands. Over the course of 21 days, the experiment demonstrated both the promise and ongoing obstacles in sending cooperative robots into environments too hazardous for humans.
The Importance of Lava Tubes in Space Exploration
Lava tubes are underground passageways formed by flowing volcanic lava that hardens around a molten core. They are found in terrestrial locations such as Iceland, Hawaii, and Spain, and are also hypothesized to exist beneath the surfaces of the Moon and Mars. These natural shelters offer stable conditions, shielding from intense solar radiation, meteorite impacts, and extreme temperature swings common on planetary surfaces. For space engineers and astrobiologists, lava tubes present two major opportunities: safe zones for constructing long-lasting human settlements and scientifically rich environments that may harbor evidence of past or existing extraterrestrial organisms.
Directly exploring these underground spaces presents significant challenges. Their difficult terrain, complete darkness, and inaccessibility pose serious risks for astronauts. Transporting humans to these remote locations on other celestial bodies is costly and complex. Autonomous robotics therefore emerges as an essential step—both supplementing and preceding any human expeditions aimed at safely entering or utilizing these caves.

Insights from the Lanzarote Mission
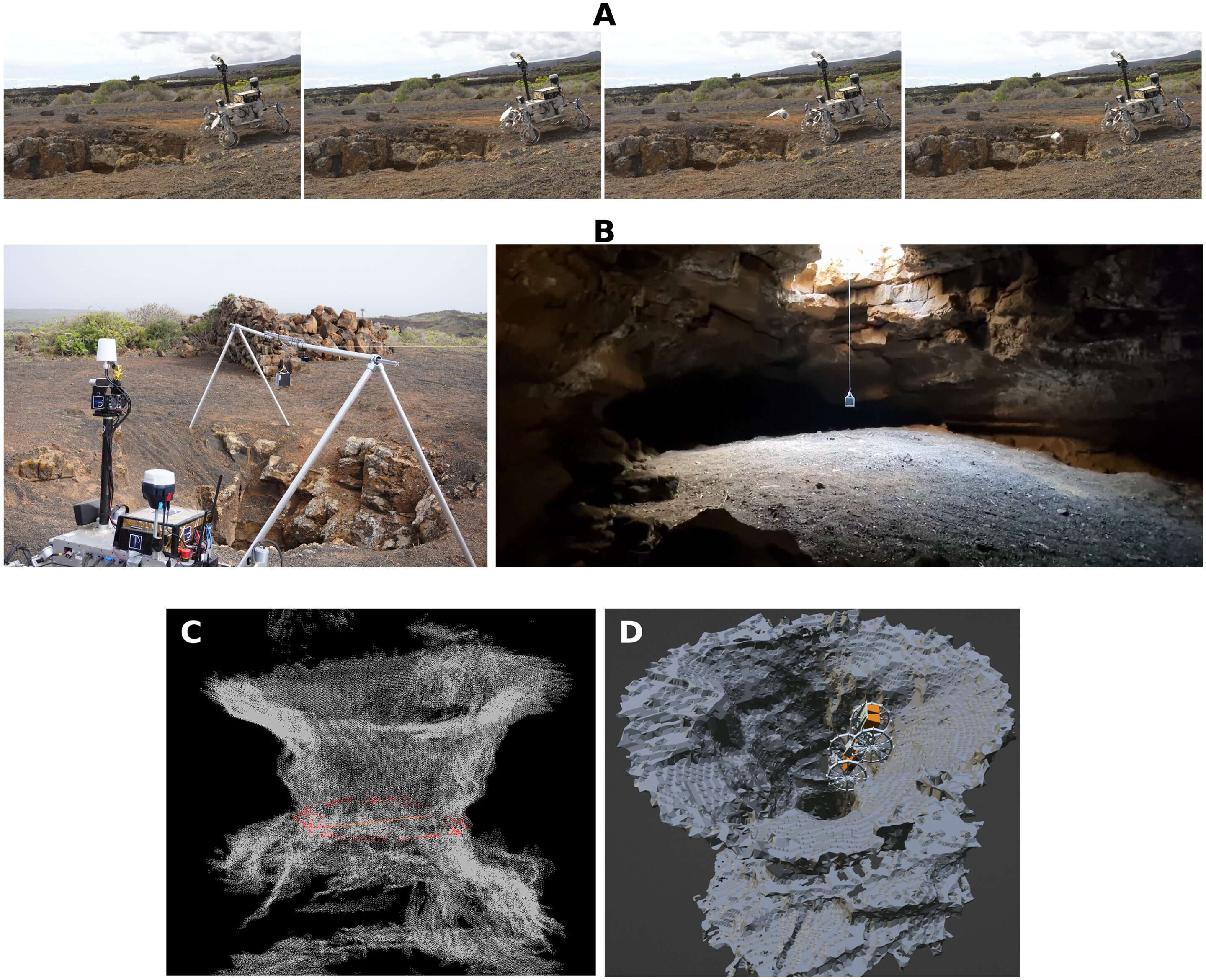
The international research team selected Lanzarote because its lava tube formations closely mirror conditions expected on Mars and the Moon. The 21-day field study was segmented into different phases aimed at evaluating various robotic functions.
The mission started with two robotic rovers exploring and mapping the cave entrance. One rover released a sensor-laden payload cube into an opening called a skylight, generating a three-dimensional map of the entryway. The following stage increased complexity: two robots collaborated autonomously. A smaller rover attached to a larger one and utilized a rappelling mechanism to descend into the cave. Once detached, it independently traveled more than 235 meters underground, creating a detailed 3D representation of the subsurface terrain.
This accomplishment marks a major advance: it’s the first real-world demonstration of a multi-robot system autonomously mapping a challenging underground environment. “A heterogeneous cooperative robot team is a promising approach to address the access and exploration of extraterrestrial lava caves,” the scientists noted in their Science Robotics report about the Lanzarote efforts.
Challenges in Fully Autonomous Cave Exploration
Despite notable successes, the expedition also revealed technical challenges. The ground-penetrating radar—crucial for detecting underground structures—faced difficulties due to high moisture levels inside the cave, a factor less relevant on Mars or the Moon but important for future instrument design. Sensor interference was another complication, as shiny surfaces and dust particles caused navigational inaccuracies.
The biggest hurdle remains the capability for complete autonomous decision-making. Although the robots showed strong skills in navigation, coordination, and mapping without human oversight, their adaptability to unforeseen obstacles and system malfunctions needs improvement. Current robotic algorithms rely heavily on pre-set instructions and environmental predictions, which might not hold in alien worlds.
Moreover, the precision of mapping depends extensively on having ground-truth reference data, which is inherently missing in extraterrestrial settings. This lack of verification restricts confidence in the accuracy of generated maps and underscores the necessity for advanced sensor data integration and error-correction techniques.
- Categories:
- News










0 comments
Sign in to Comment